
残量検知や異常検知の精度向上に寄与するセンサー
医療用途の異常検知への使用事例
医療機器メーカーM社 様
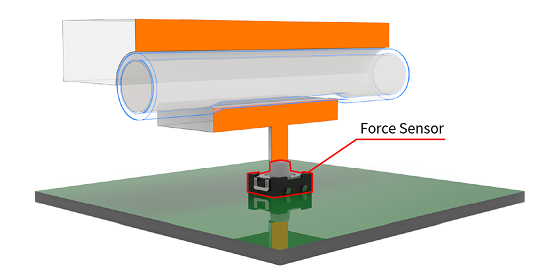
送液状態を「力」で捉える。医療用ポンプ制御をフォースセンシングで実現。
医療機器の開発を手がけるM社では、輸液ポンプをはじめとする医療用ポンプにおいて、送液状態の安定性と安全性をいかに確保するかが重要な課題となっていました。特に、閉塞(詰まり)やチューブ状態の変化、送液時に生じる負荷変動を適切に検知することは、医療機器として欠かせない要件です。
従来、M社では起歪体に歪みセンサーを貼り付け、これに密着させたチューブの変位量を測定することで送液状態を把握していました。微小な変位を検知できる一方で、センサーの取り付け精度に測定結果が左右されやすく、設計・調整工数の増加が課題となっていたのです。また、長期使用に伴う0点ずれや経時変化といった問題もあり、安定した検知を維持することが難しい状況でした。
一方で、医療機器という特性上、高い安全性と信頼性に加えて小型化や省スペース化も求められるため、大型センサーの追加や大幅な構造変更は現実的ではありません。そこでM社では、送液機構内部への組み込みを前提に、薄型・小型構造で微小な力の変化を検知できるフォースセンサー(HSFPARシリーズ) に着目しました。
フォースセンサーを用いることで、送液時に発生する負荷変動を直接取得できる可能性があり、残量検知や異常検知の精度向上に寄与するセンサーとして評価されています。現在は、輸液ポンプをはじめとする医療用ポンプ用途への展開を視野に入れた検討が進行中です。
まとめ
フォースセンサー(HSFPARシリーズ)は、薄型・小型で機構部に組み込みやすい特長があります。そのためロボットアームにおける把持 や医療用ポンプにおける送液 といった重要工程において、これまで離散的データや間接的データに頼っていた制御を「力」という定量的な情報に置き換える役割を果たせるようになりました。
こうした特性により、機構設計制約 の厳しい領域でも活用が検討されており、制御性や安全性、再現性の向上に寄与しています。「物を感じ」「力をどう扱うか」 が価値となるさまざまな製品において、設計の選択肢を広げるセンサーとして、今後も幅広い分野での活用が期待されています。